¶ 卓尔-ARM运行脚本
卓尔-ARM的运行脚本位于robot_shell文件夹下。可测试机器人的各项功能运行正常。
¶ 卓尔-ARM键盘运动控制
打开终端,输入以下命令,启动机器人底盘通讯与键盘运动控制:
cd ~/robot_shell
./1-key_control.sh
Linux命令行输入,执行上面的脚本。
切到弹出来的终端的第三个窗口,根据提示控制键盘进行前后左右移动和转向:
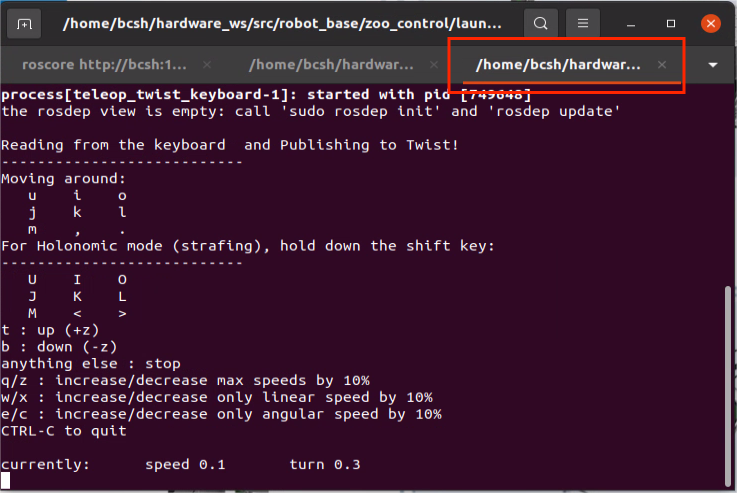
键盘控制按键:
i:前进
k:停止
<:后退
j:左转
l:右转
¶ 卓尔-ARM机器人前端深度相机测试
打开终端,输入以下命令,启动深度相机的通讯:
cd ~/robot_shell
./2-camera.sh
结果如下:

¶ 卓尔-ARM激光雷达测试
打开终端,输入以下命令,启动激光雷达的通讯:
cd ~/robot_shell
./3-lidar.sh
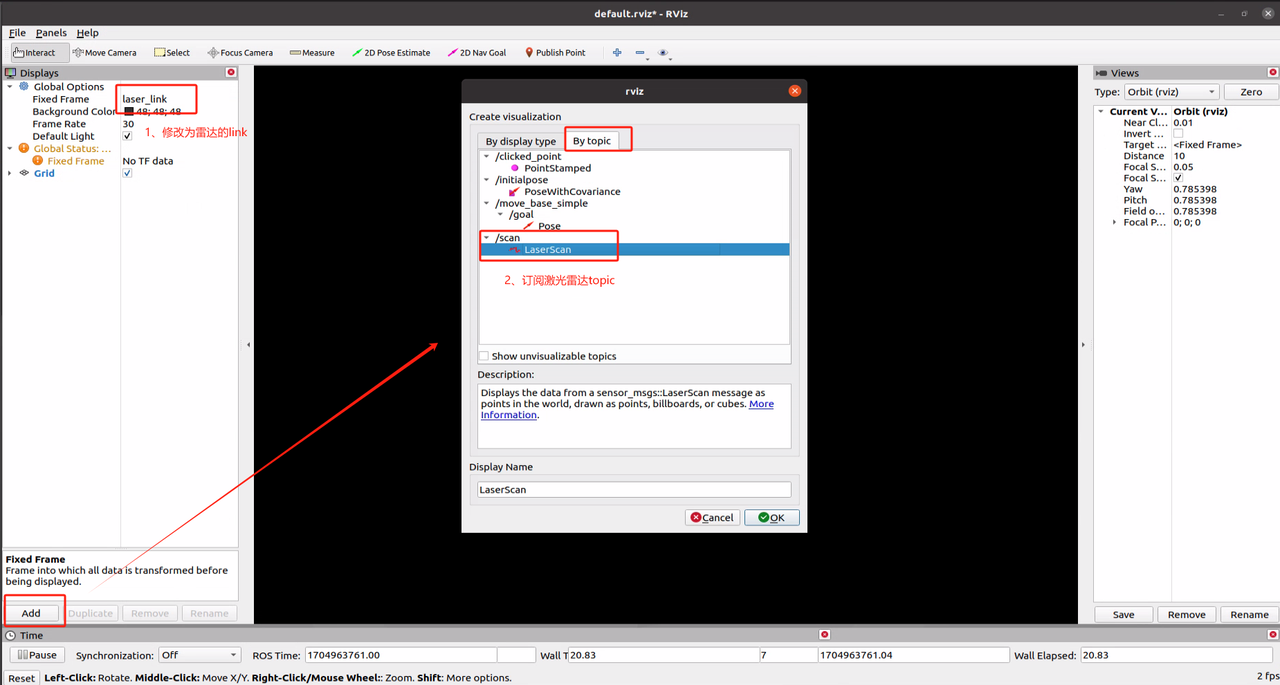
新建一个命令行终端,输入rviz,打开rviz :

修改 Fixed Frame 为 laser ,并订阅激光雷达topic,topic为/scan:
可以在rviz里看到激光雷达的点云数据:
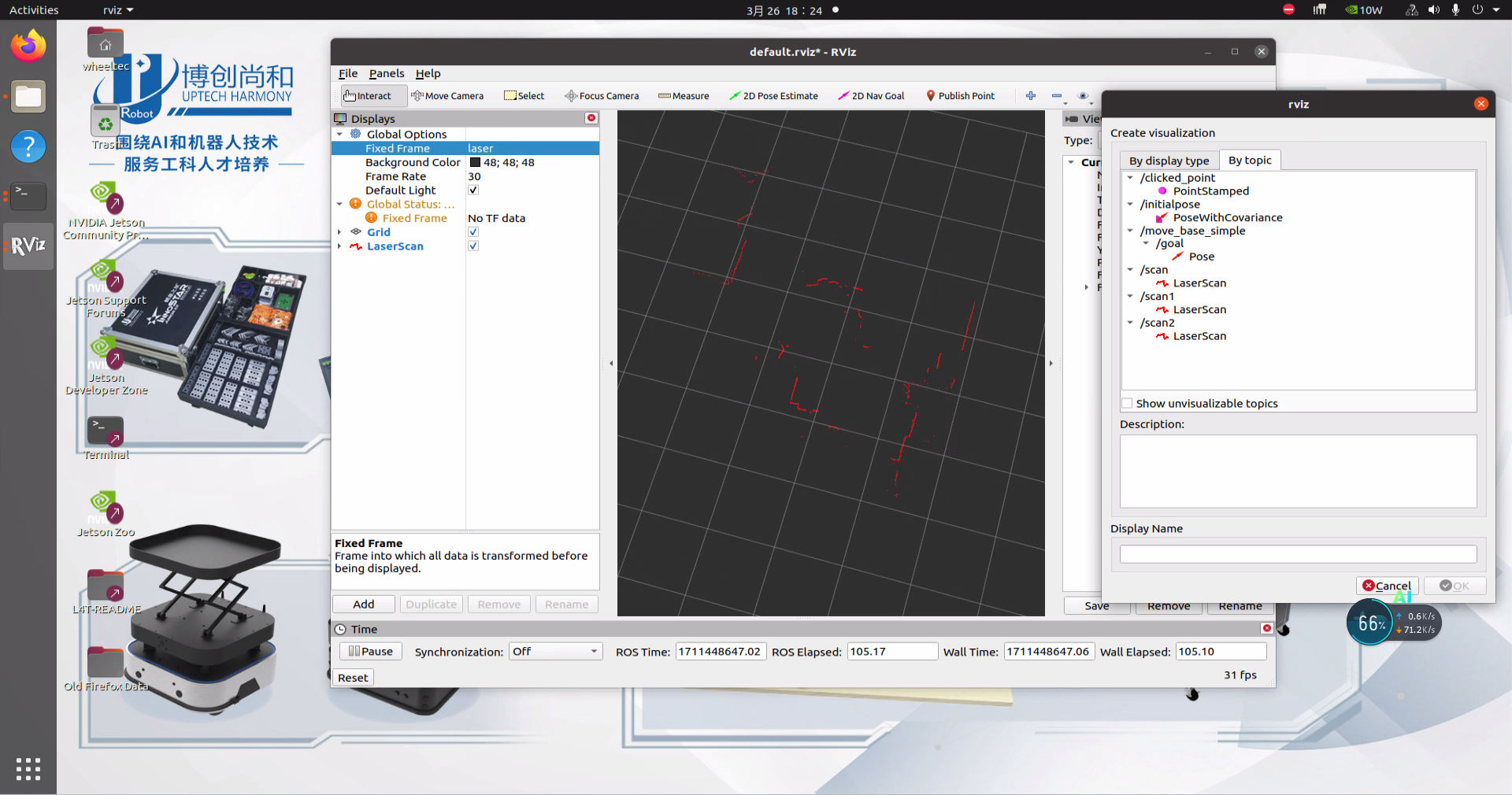
注意,这里的scan1和scan2,是因为卓尔-ARM在前后分别安装了两款激光雷达,scan1和scan2是两个激光雷达单独的数据,/scan是我们将两个雷达数据拼接在一起,后续定位导航应用的数据
注意,一定要选择正确的Fixed Frame,否则不会出现激光雷达数据
¶ 卓尔-ARM建图测试
打开终端,输入以下命令,启动建图:
cd ~/robot_shell
./4-gmapping.sh
新建一个命令行终端,输入rviz,打开rviz,修改 Fixed Frame 为 map ,并订阅地图topic,topic为/map:
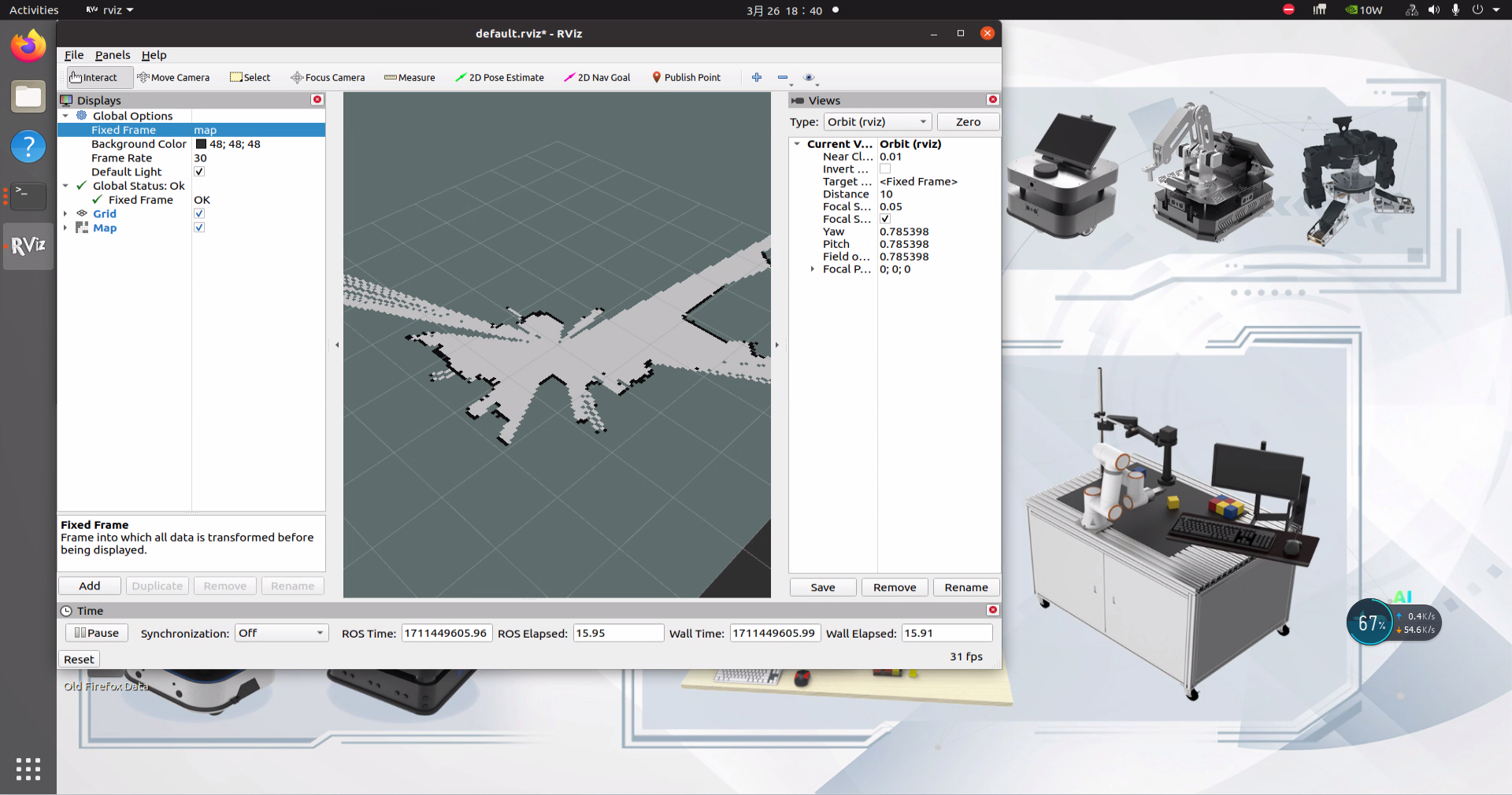
可以切换到脚本最后一个终端,用键盘控制机器人运动,补全地图。
新建一个终端,输入以下命令即可保存地图:
cd ~/robot_shell
./5-save_map.sh
这样我们就保存了刚才建立的地图。
¶ 卓尔-ARM自主导航测试
首先,确保你的卓尔-ARM放置在建图起点,然后打开终端,输入以下命令,启动自主导航:
cd ~/robot_shell
./6-navigation.sh
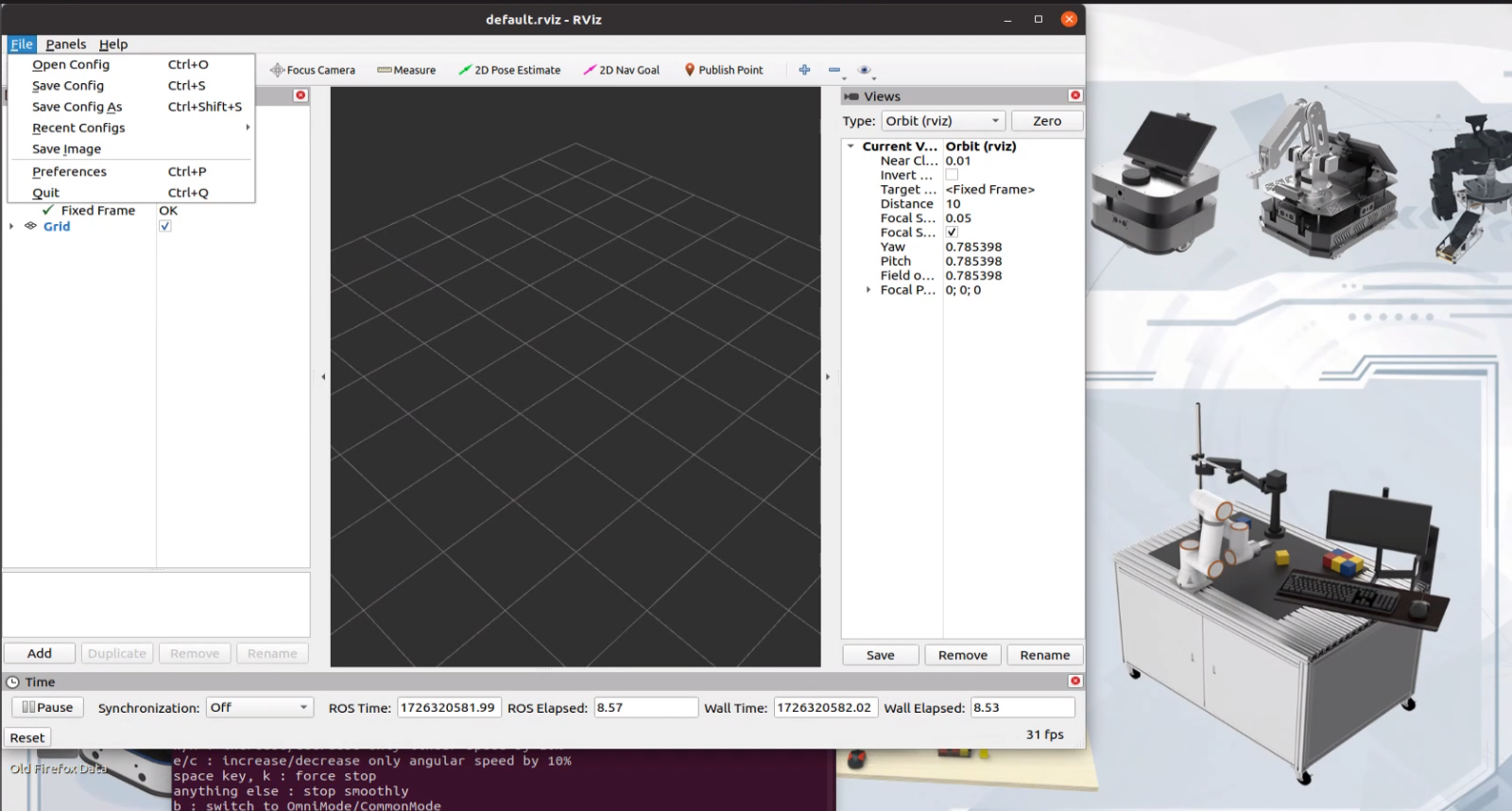
然后打开新的终端输入rviz,在rviz中,选择OpenConfig
在弹框中,选择下面的文件:
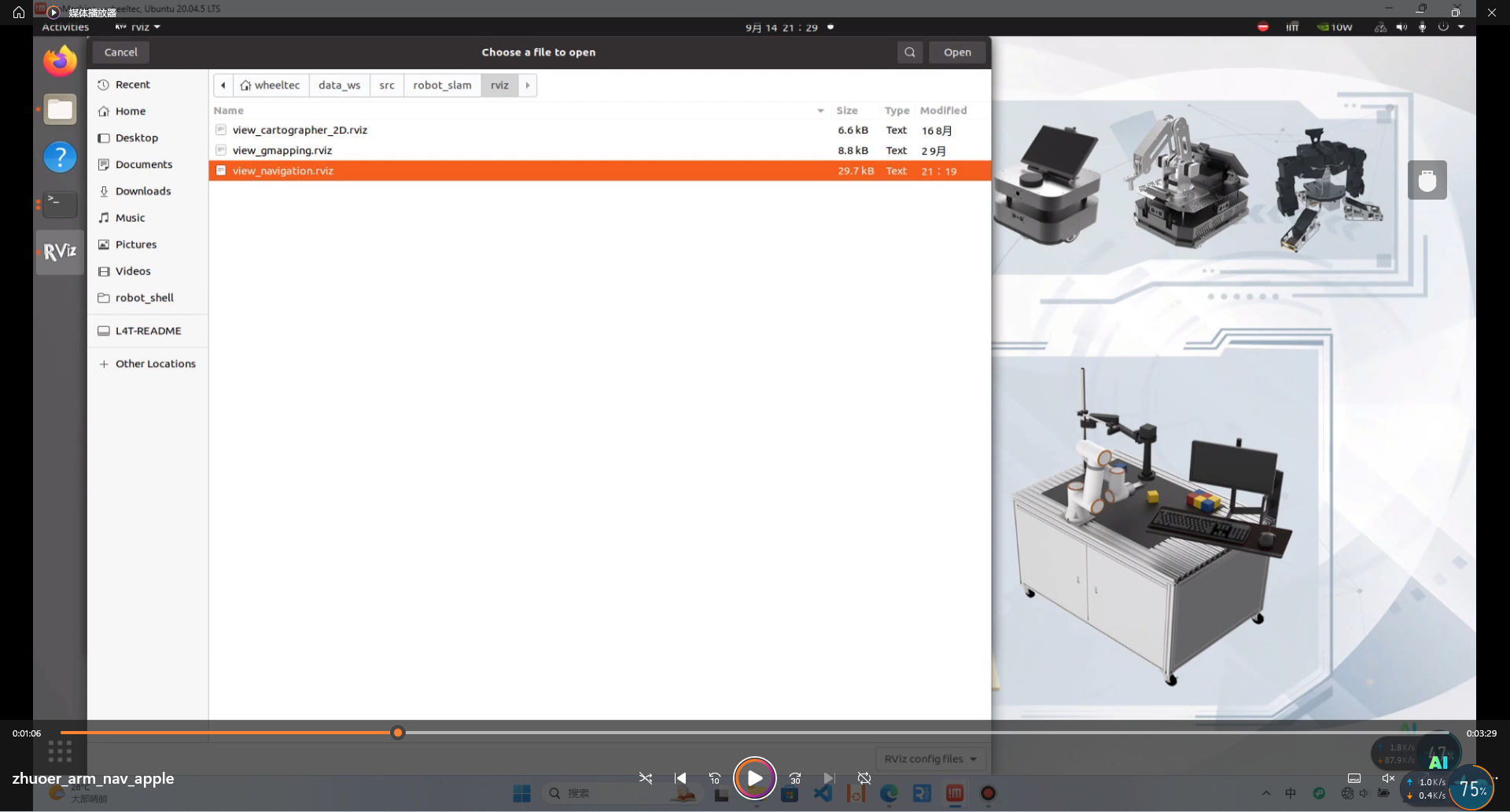
即可加载导航相关配置:
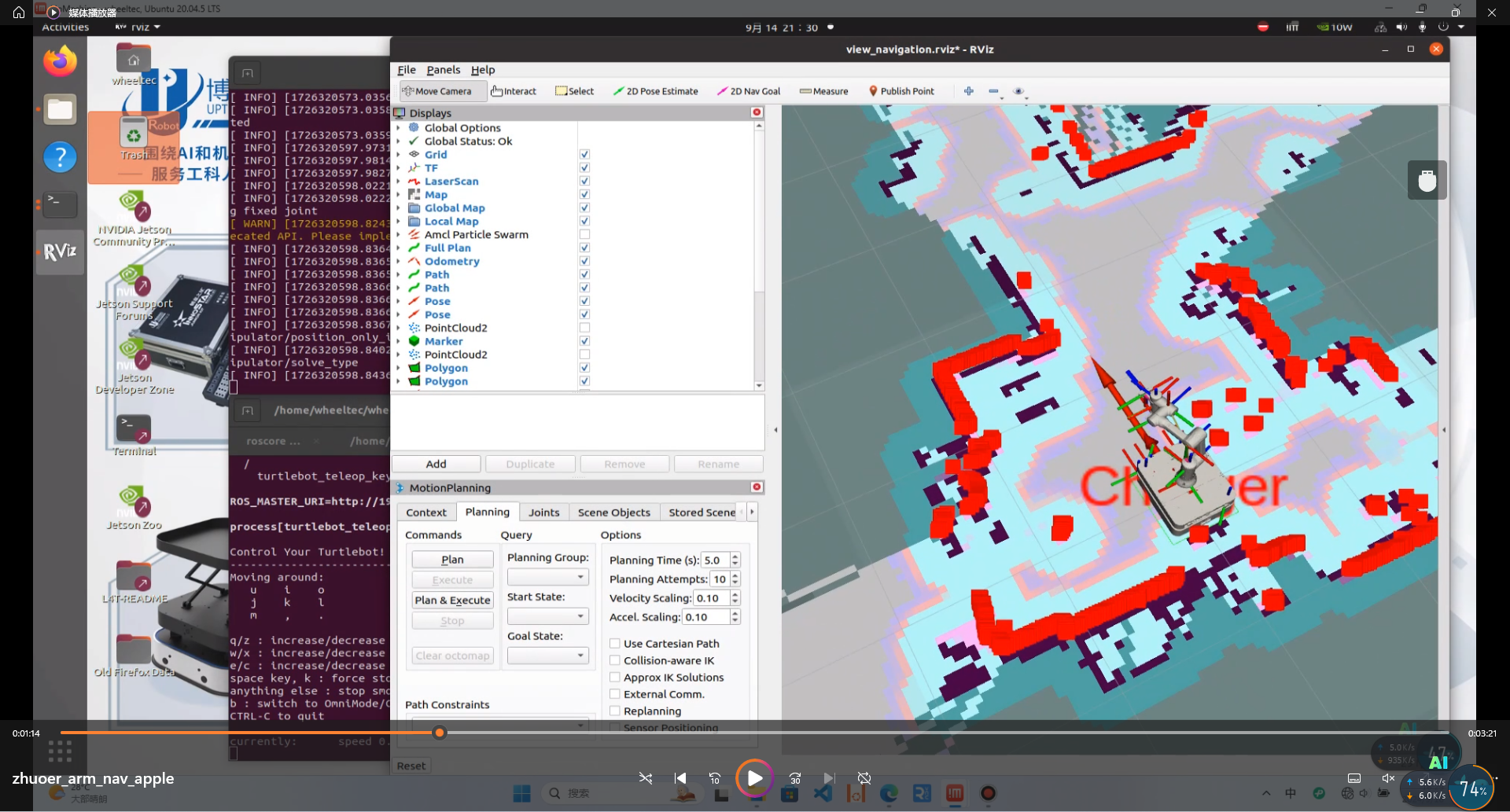
在上方2D Nav Goal按钮选择相应的按键即可实现自主导航。
¶ 卓尔-ARM机械臂运动学测试
首先,确保机械臂正常上电。
然后打开终端,输入:
cd ~/robot_shell
./8-line-move.sh
机械臂会执行一段路径,该路径为三角形。
关闭上述终端,打开终端输入:
cd ~/robot_shell
./9-circle-move.sh
演示视频如下:
卓尔-ARM机械臂路径规划