¶ 卓尔ARM底盘运动与传感器教程
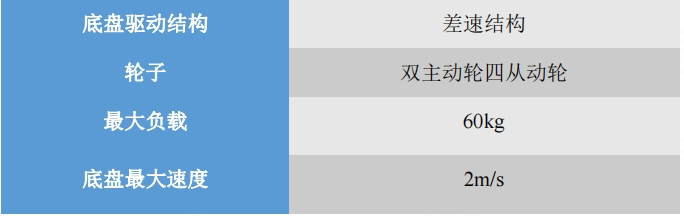
¶ 底盘运动
底盘参数如下:
底盘可以通过ROS的/cmd_vel主题进行控制,消息类型为geometry_msgs/Twist,可以通过rostopic pub命令发布消息进行控制。
通过如下launch文件启动底盘:
roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch
¶ 深度相机
深度相机参数如下:

可通过如下launch启动车前端深度相机:
roslaunch turn_on_wheeltec_robot wheeltec_camera.launch
可通过如下launch启动机械臂深度相机:
roslaunch astra_camera gemini_arm.launch
¶ 激光雷达
激光雷达参数如下:

两台激光雷达拼接到一起。
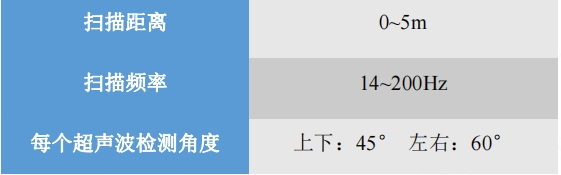
¶ 超声传感器
超声传感器参数如下: