¶ ROS-参数
¶ 实验目的
-
掌握ROS机器人通信系统架构
-
掌握参数的原理及其使用场景
-
掌握ROS参数指令集
-
掌握使用C++和Python实现ROS参数服务器
¶ 实验内容
本实验主要学习以下几方面的内容:
-
ROS通信架构
-
ROS参数的原理
-
参数常用指令集
-
实现ROS参数的查询,修改,列举等功能
¶ 实验仪器、设备和材料
1.所需仪器设备
(1)“卓越之星”设备-用于功能调试;
(2)个人PC-用于应用程序的开发与展示;
2.注意事项
(1)个人PC需要安装NoMachine或者VSCode支持远程编程开发;
(2)运动实验尽可能将设备平放在地面上;
(3)实验开始前确保设备电量为满电,实验完成后关闭设备电源;
¶ 实验原理
¶ ROS 中的参数
在 ROS 中,参数是一种用于存储和传递数据的机制。它们通常用于指定节点的配置参数,例如一个节点的名称、频率、发布的主题等等。
ROS 参数有两种类型:全局参数和私有参数。全局参数可由多个节点共享,而私有参数只能由一个节点使用。
在 ROS 中,可以使用命令行工具rosparam来设置和获取参数。例如,要设置一个参数,可以使用以下命令:
rosparam set <parameter_name>
其中,<parameter_name>是参数的名称,是参数的值。要获取一个参数,可以使用以下命令:
rosparam get <parameter_name>
此外,还可以通过rosparam命令从文件中读取和写入参数。
在 ROS 节点中,可以使用ros::NodeHandle类来访问参数。例如,要获取一个参数的值,可以使用以下代码:
ros::NodeHandle nh;
int my_param;
nh.getParam("my_param", my_param);
其中,"my_param"是参数的名称,my_param是一个变量来存储参数的值。
以下是一些常用的 ROS 参数指令:
- rosparam set <parameter_name> :设置一个参数的值。
- rosparam get <parameter_name>:获取一个参数的值。
- rosparam load :从一个 YAML 文件中加载参数。
- rosparam dump :将参数保存到一个 YAML 文件中。
- rosparam delete <parameter_name>:删除一个参数。
- rosparam list:列出所有的参数。
- rosparam get /:获取所有全局参数的值。
- rosparam set /<node_name>/<parameter_name> :为特定的节点设置私有参数。
¶ 使用 C++对参数进行操作
以下是一个使用 C++设置和读取以及查询 ROS 参数的示例:
#include <ros/ros.h>
int main(int argc, char **argv) {
// 初始化ROS节点
ros::init(argc, argv, "my_param_node");
// 创建节点句柄
ros::NodeHandle nh;
ros::NodeHandle private_nh("~");
std::string param_name = "my_param";
std::string param_value = "hello";
std::string my_param_first;
private_nh.getParam(param_name, my_param_first);
ROS_INFO("The value of %s is %s", param_name.c_str(), my_param_first.c_str());
// 设置一个参数
nh.setParam(param_name, param_value);
// 获取一个参数
std::string my_param;
nh.getParam(param_name, my_param);
ROS_INFO("The value of %s is %s", param_name.c_str(), my_param.c_str());
ros::spin();
return 0;
}
在上面的代码中,首先我们初始化了 ROS
节点,并创建了一个节点句柄nh。然后我们设置了一个私有参数my_param,并将其值设置为hello。接下来,我们使用getParam函数获取该参数的值,并将其存储在变量my_param中。最后,我们使用ROS_INFO函数输出参数的值。
运行结果:

¶ 使用 Python 设置和读取一个参数
以下是一个使用 Python 设置和读取,查询 ROS 参数的示例:
#!/usr/bin/env python3
import rospy
def param_demo():
rospy.init_node("param_demo")
rate = rospy.Rate(1)
while(not rospy.is_shutdown()):
#get param
parameter1 = rospy.get_param("param1", default=111)
parameter2 = rospy.get_param("param2", default=222)
rospy.loginfo('Get param1 = %d', parameter1)
rospy.loginfo('Get param2 = %d', parameter2)
#set param
rospy.set_param('param2',2)
#delete param
rospy.delete_param('param2')
#check param
ifparam3 = rospy.has_param('param3')
if(ifparam3):
rospy.loginfo('param3 exists')
else:
rospy.loginfo('param3 does not exist')
#get all param names
params = rospy.get_param_names()
rospy.loginfo('param list: %s', params)
rate.sleep()
if __name__=="__main__":
param_demo()
在上面的代码中
- 我们首先使用rospy.init_node()函数初始化 ROS 节点,
- 使用rospy.get_param(‘param1’)获取参数为变量赋值,如果不能获取,默认将变量 parameter1 设置为 111
- 使用rospy.get_param(‘param2’)获取参数为变量赋值,如果不能获取,默认将变量 parameter2 设置为 222
- 使用rospy.set_param(‘param2’,2)为参数赋值
- 使用rospy.delete_param(‘param2’)删除参数
- 使用ifparam3 = rospy.has_param(‘param3’)查询是否有此参数
- 使用rospy.get_param_names()查询所有参数名称
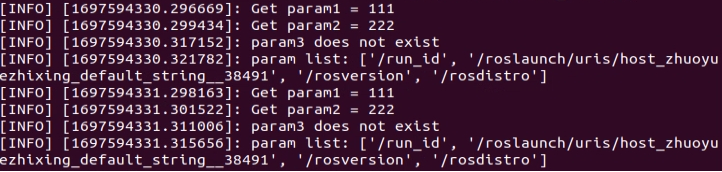
运行结果:
除了使用代码,我们一般会使用 launch 文件配置 ROS 参数,比如上面这个节点,我们把参数配置成launch如下:
<launch>
<node name="parameter" pkg="class_4_pkg" type="ros_param" output="screen">
<param name="my_param" value="ros!!!!"/>
</node>
</launch>
上面这个文件名为parameter.launch,把节点的参数提前设置在launch里,可以通过下面指令来启动节点。
roslaunch class_4_pkg parameter.launch
¶ 实验步骤
- 首先打开卓越之星的电源,AI处理器与PC连接到同一个局域网,使用Nomachine或Remote-SSH进入开发模式;
- 然后打开一个终端,输入roscore,启动ros的master;
- 在ROS中创建一个工作空间;
- 在这个工作空间中创建一个功能包;
- 在功能包内,实现一个C++的ROS节点,对参数进行查询,修改,删除和校验,打印出ROS当前所有的参数列表;
- 在功能包内,实现一个Python的ROS节点,对参数进行查询,修改,删除和校验,打印出ROS当前所有的参数列表;
- 在功能包内,实现一个launch文件,在launch文件中预先设定好参数,分别从roslaunch和rosrun两种方式启动节点来比较异同;
¶ 数据及结论
- 编译节点,展示节点运行结果。
¶ 思考题与扩展
- 什么是ROS参数服务器?它为什么要用于存储参数?
- ROS参数与ROS主题和服务有何不同?在什么情况下使用参数更合适?
- 如何定义、设置和获取ROS参数?请给出示例代码。
- 参数服务器中的参数是如何被组织和管理的?它们的作用域是什么?
- 如何动态地更改ROS参数,并在运行时使这些更改生效?
- 在ROS节点中,如何确保对参数的读取和写入是线程安全的?
- ROS参数的最佳实践是什么?如何避免常见的陷阱和错误?
- 如何使用ROS参数来配置和初始化机器人的行为或参数?
- 请描述一个你曾经使用过ROS参数的实际项目或应用场景。
- 当ROS系统中的多个节点需要访问或修改同一参数时,如何解决潜在的冲突或一致性问题?