# 项目一、制作避障小车机器人
¶ 一、实验目的:
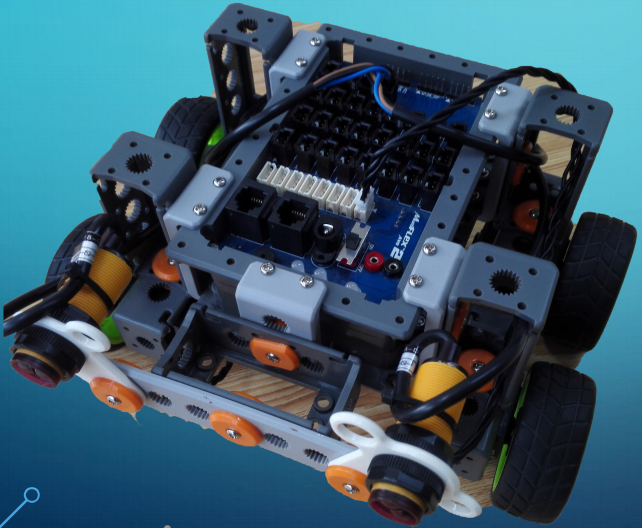
利用机器人套件搭建一个四轮驱动的避障小车机器人,对避障机器人的工作流程进行设计与实现。
¶ 二、实验器材:
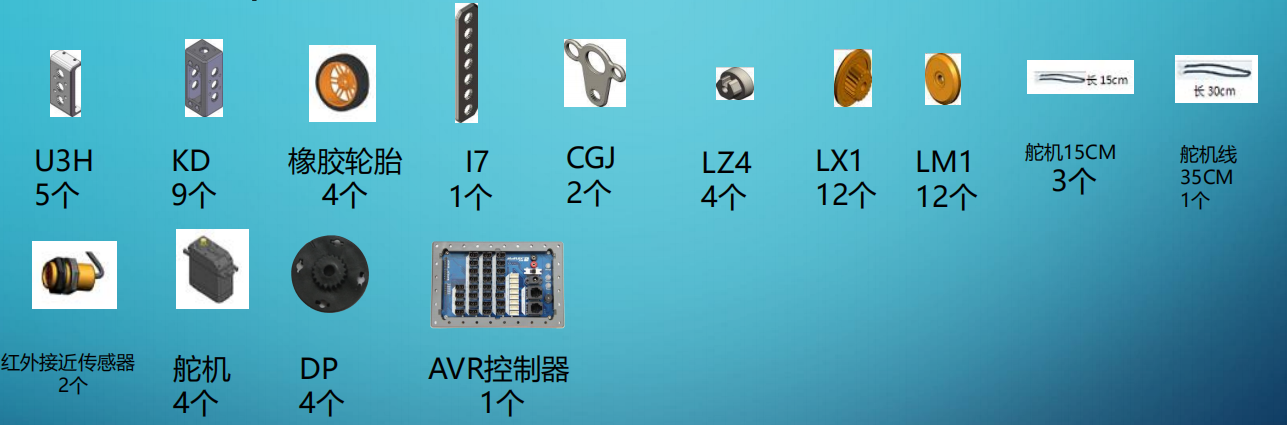
电脑一台、多功能调试器一套、12V5A适配器一个。使用创意之星标准版的如下组件。
¶ 三、实验内容:
机器人功能分析:
A、四轮驱动运动结构
B、开关量距离传感器获取信息装置
C、机器人能够自主避障,运动期间需要躲避障碍物。
设计机器人并进行搭建:
可以参考项目一附件《避障小车机器人搭建手册》也可自主设计搭建。
程序设计
本项目包含较多的功能需求,首先需要实现机器人的运动,完成前进、后退、左转、右转等功能,能够检测到路径两边的障碍物,然后以此确定路径的走向。
项目流程与功能分析:
项目整体运行流程的可行性,是项目是否能够最终实现的基础。通过分析项目要求,可以得到以下的项目运行流程。
① 机器人位于未知路径的起点并开始运动。
② 机器人采用传感器检测周围障碍信息。
③ 机器人根据检测信息判断运动方式与速度。
④ 机器人的运行机构完成设定的走向与速度。
⑤ 采用周期控制,机器人返回SP②,循环运行。
以上流程所涉及的功能需要由感知、控制、执行3个模块完成。各个模块在流程中所负责的工作如下。
- 控制模块:合理的运动设置(③、⑤)。
- 感知模块:障碍检测(②)。
- 执行模块:各电机配合运动至定点(④)。
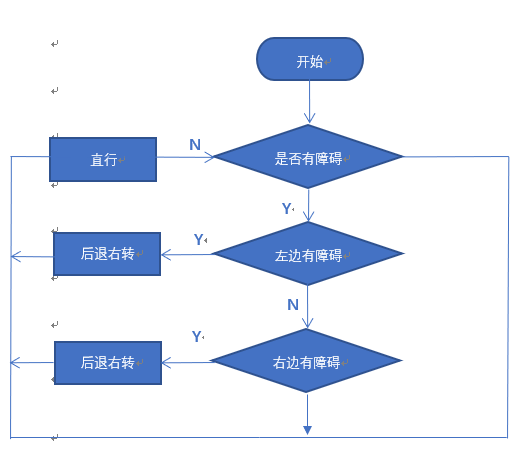
流程图:
¶ 四、项目竞赛
避障小车竞速赛规则
比赛时间:不限制
比赛规则:在规定赛道上最快时间完成比赛,设置出发区和终点区,赛道上可设置多种障碍,障碍物的设定可根据复杂程度选择不同高度,尺寸的障碍物,机器人可根据障碍物的类别及赛道情况选择不同的行进方式来更好的避开障碍物成功到达终点区。
胜负判定:根据机器人的完成情况给予相应分数,分数相同用时最短者获胜。