# 项目二、制作机械臂机器人

¶ 一、实验目的:
搭建一个简易的多关节机械臂,并使机械手能够实现一个完整的抓取流程。
¶ 二、实验器材:
电脑一台、多功能调试器一套、12V5A适配器一个、创意之星控制器。下面是建议使用的器材。

¶ 三、实验内容:
机器人功能分析:
A、机械臂有机械爪结构,可以抓取物体。
B、机械臂可以在空间内自由运动,需要满足6个自由度。
设计机器人并进行搭建:
可以参考项目二附件《机械臂机器人搭建手册》也可自主设计搭建。
程序设计
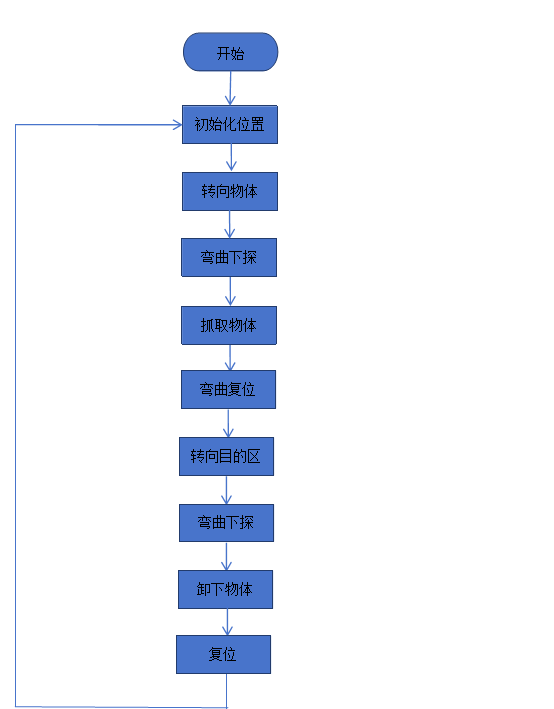
- 复位:初始化位置复位
- 转向:机械臂转动至目标物方向
- 弯曲:机械臂中段弯曲
- 抓取:机器爪张开并夹持目标物
- 弯曲复位:机械臂恢复至弯曲前状态。
- 转向:机械臂转向目的区方向
- 弯曲:机械臂中断弯曲
- 卸货:机械爪张开,放下物品
- 机械臂逆序恢复至复位状态。
本项目搬运功能实现及初始状态复位一共有10个位置点,其中弯曲和复位各有2个点,这2个位置点对应相同。所以只需要利用舵机调试软件对8个位置点的各个舵机角度查询,就可以进行程序的编写。
流程图:
¶ 四、项目竞赛
搬运任务竞赛:
竞赛时间:不限制
竞赛形式:以最快速度将指定的五批货物搬运至指定区域。设置起点物品摆放区和终点物品归置区,参赛选手需将机械臂结构固定在指定位置,摆放区与归置区距机械臂轴心20cm(距离可根据实际情况进行调整),机械臂机器人需将指定的五批货物以最快速度搬运至归置区。
胜负判定:根据机械臂成功搬运至归置区物品数量进行排名,数量相同按照完成时间长短进行排名。
协同工作挑战赛:
竞赛形式:2个机械臂协同工作完成物料的交接,在规定时间内将物料搬运至目标区域,最终搬运数量多的队伍获胜。