# 项目四、制作扎气球机器人
¶ 一、实验目的:
搭建扎气球机器人,自主设计其结构,程序,及检测策略。
¶ 二、实验器材:
电脑一台、多功能调试器一套、12V5A适配器一个。下面是建议使用的器材。


¶ 三、实验内容:

机器人功能分析:
A、移动底盘
B、检测气球方向的装置
C、判断自身到气球的距离装置
D、扎破气球的装置
设计机器人并进行搭建:
可以参考项目五附件《扎气球机器人制作手册》也可自主设计搭建。
程序设计
程序流程:
- 初始状态下,机器人直行,并进入气球搜索循环。
- 在气球搜索循环中,如果没有发现气球,直接进入下一搜索周期。
- 如发现气球,气球位于中间及前后位置适中,则进行抓取流程。
- 如果气球不位于中间位置,对机器人进行原地转动。
- 气球如果不位于合适的抓取位置,对机器人进行直行(前进或后退)移动。
抓取流程包含以下3个步骤:机器人运行停止、控制机械手到抓取位置并抓取、控制机械手归位。完成单次抓取流程后,返回气球搜索循环。
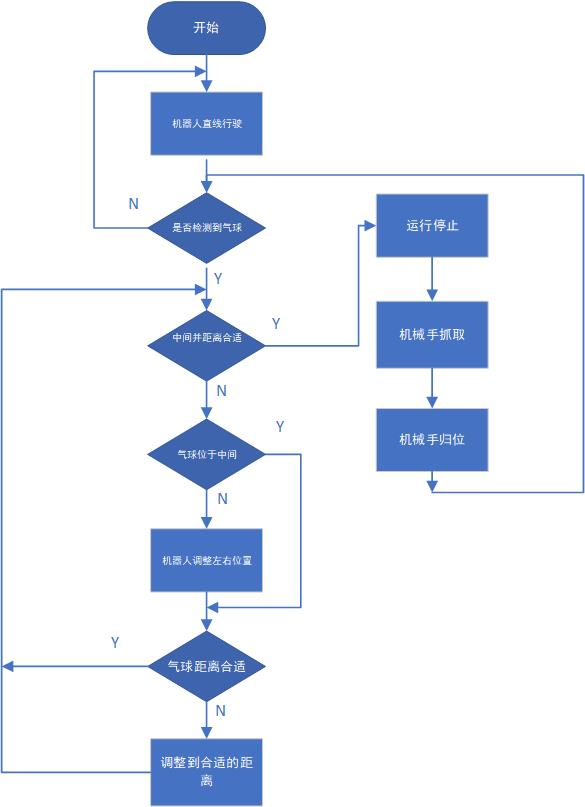
程序流程图
¶ 四、项目竞赛
竞赛规则
可以进行记时赛和对抗赛。
计时赛规则
比赛时间:不限制
比赛规则:在最快的时间内扎破5个气球,气球直径10cm。设置出发区和气球识别区,出发区距离气球识别区1m。机器人需要在出发区启动后,自主移动到气球识别区,并将气球扎破。
胜负判定:扎破完5个气球的用时即为比赛成绩,根据完成时间的快慢进行成绩排序。(也可规定时间,在限定的时间内看其扎破的气球数量)
对抗赛规则
比赛时间:2分钟
比赛规则:两队从对向的出发区启动机器人,出发区距离气球识别区为50cm,气球7个,直径10cm。
胜负判定:看两队在规定的时间内,谁扎破的气球数量多,即为获胜。