¶ 创意之星模块化机器人用户手册

¶ 免责声明
-
为保护用户的合法权益,请您在使用本产品前务必仔细阅读我们随产品提供的使用手册或实验指导书、免责声明和安全须知,请您务必按照使用手册和安全须知操作本产品。北京博创尚和科技有限公司保留对上述文档进行更新的权利。
-
本产品不适合未满 18 周岁及其他不具备完全民事行为能力的人士使用,请您避免上述人士接触本产品,在有上述人士出现的场合操作时请您格外注意。
-
购买本产品前用户对本产品的功能、技术参数、安全性等都已清楚。一旦开始使用本产品,即视为用户已阅读、理解、认可和接受本产品的使用手册或实验指导书、免责声明和安全须知的全部条款和内容,用户对自已的行为及因此而产生的所有后果负责,北京博创尚和科技有限公司将不承担任何责任。
-
用户仅出于正当的目的使用本产品,使用本产品直接或间接发生的任何违反法律规定的行为,北京博创尚和科技有限公司将不承担任何责任。
¶ 安全须知
- 本产品配套锂电池,相关产品完全符合行业安全标准。对电池使用请遵循以下建议:
- 使用我司为本产品提供的专用的充电设备,当提示充满电时应及时停止充电。
- 当电池长时间不用时要进行充电存放,避免电池过放。
- 将电池存放于干燥通风处,避免阳光直射。若需存放超过三个月,推荐存放的温度区间为22摄氏度至28摄氏度。切勿将电池存放于低于零下10摄氏度或高于40摄氏度的场所。
- 当电池发生碰撞或跌落后,应立即检查电池外观、充放电接头是否有异物刺穿或线缆绝缘皮破损等情况。如发生剧烈碰撞或跌落,建议更换电池。
- 当电池发生鼓胀或充电时长不正常时及时切断电源。
- 电池充电时应置于安全区域,保持周边干燥,且无易燃易爆等物品。
- 避免在无人看守的情况下充电。
- 定期检查电池电量,当电池循环使用超过500次,建议更换新电池。
- 如果发生燃烧或爆炸现象,人员必须远离,在做好防护措施的前提下,可以采用二氧化碳或ABC干粉灭火器灭火或使用沙子直接覆盖燃烧或爆炸的电池,严禁使用水灭火。
-
本产品为室内使用设备,使用场地应保证平坦,坡度符合设备相关参数要求,室内因光照条件不足、部分功能使用可能受限制。
-
使用本产品时,应在零下10摄氏度至40摄氏度的环境中运行,应远离大功率发射设备等高电磁干扰的环境。
-
本产品为非防水设计,请勿在有地面积水或下雨、下雪、大雾环境中使用。
-
在使用本产品时,请始终保持设备在操作者目视范围内。
-
当有围观人群靠近时,请小心操控,避免发生意外。
-
本产品不可在饮酒、疲劳、服用药物、身体不适等情况下使用。
-
请在每次使用前对本产品进行检查,包括但不限于零部件的牢固度、机体的裂痕和磨损、电池电量、指示灯的有效性等。当发现异常时,请立即停止使用并更换相应配件。
-
请使用原厂配件进行维护和替换。
-
设备工作区内不得堆放任何物品和杂物。
-
使用完毕后按程序关闭好电源开关,清理好使用现场。
-
勿用力摇晃设备及在设备上悬挂超过参数要求的重物。
-
在设备使用中,勿有危险行为或游戏。
-
请确保设备在运动中不会与自身或其他物体产生剧烈碰撞。
-
请注意设备的旋转轴,防止电缆线、杂物的缠绕。请与轴保持距离,以防止头发 或衣服被缠绕。
-
如果设备已损坏,请勿继续使用。
-
请在设备参数范围与使用寿命内使用设备,否则会造成严重的安全问题。
-
转借给其他人员操作,请确保操作人员理解和遵守本安全须知。
-
请严格遵循本产品安全须知、使用手册的全部条款和内容。
¶ 创意之星各模块介绍
¶ 创意之星主控制器
创意之星控制器集成数字量接口、模拟量接口、R\C舵机接口、数字舵机接口、RS232接口和RS422总线接口,具有丰富的扩展能力。同时控制器对超负荷功率输出、电源反向输入、电池电压过低、电源输入电压过高等具有自我保护功能。

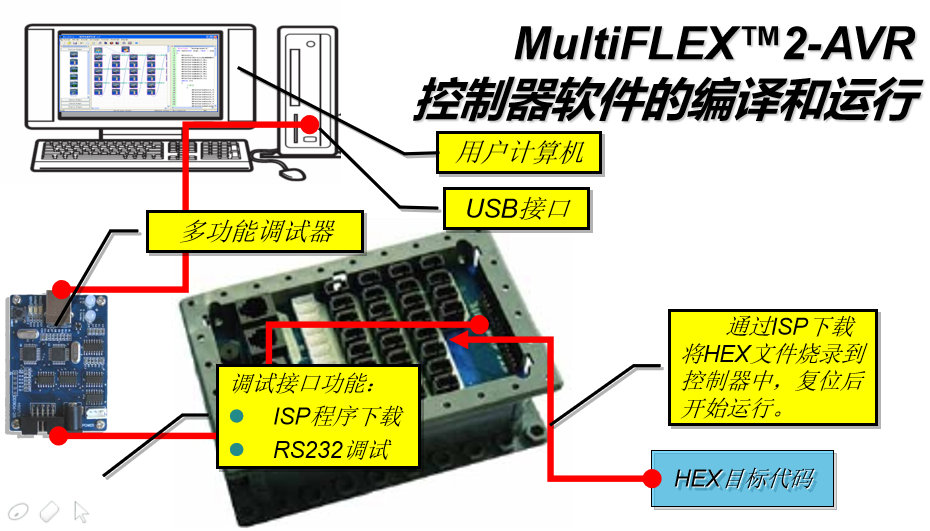
创意之星主控制器MultiFLEX™2-AVR
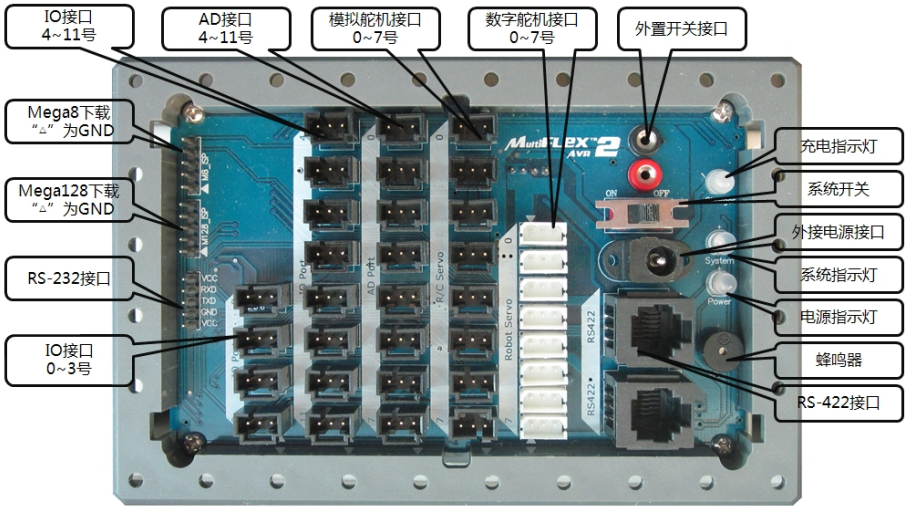
创意之星主控制器外部接口及电气规范
MultiFLEX™2-AVR控制器功能如下:
-
核心处理器ATmega128@16MHz
-
8个机器人舵机接口,完全兼容Robotis Dynamixel AX12+
-
8个R/C舵机接口
-
12个TTL电平的双向I/O口,GND/SIG/VCC三线制
-
8个AD转换器接口(0~5V)
-
2个RS-422总线接口(可挂接1-127个422设备)
-
1个无源蜂鸣器
-
通过RS-232与上位机通讯,可选无线通讯模组
-
使用USB接口的AVR-ISP下载调试器
¶ 创意之星多功能调试器UP_Debugger
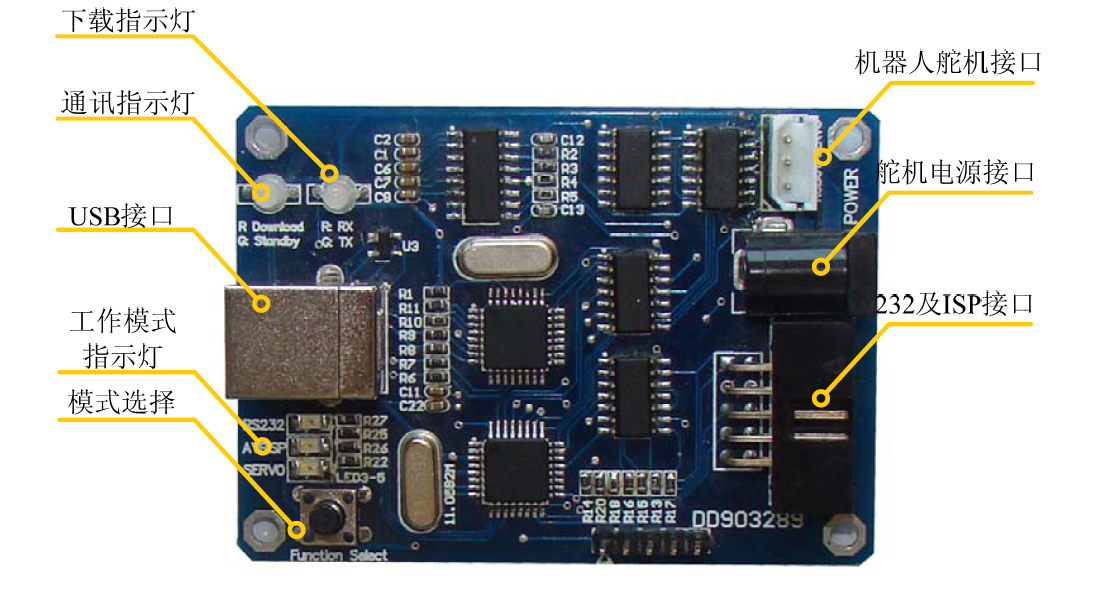
UP-Debugger多功能调试器集成了USB-232,半双工异步串行总线、AVRISP三种功能,体积小巧、功能集成度高,是一种可靠且方便的调试设备。通过功能选择按钮可以让调试器的工作模式在RS232、AVRISP、数字舵机调试器之间相互切换。可以对AVR控制器进行串口通讯调试和程序下载,可以对proMotion CDS5516数字舵机进行调试和控制。
多功能调试器驱动:联网用驱动精灵自动搜索驱动安装即可。
创意之星多功能调试器Up_Debugger功能如下:
-
RS232模式下可实现串口通讯调试
-
AVRISP模式下可实现下载程序
-
控制、传感模块功能的串口PC端调试
-
舵机模式下可对舵机进行调试
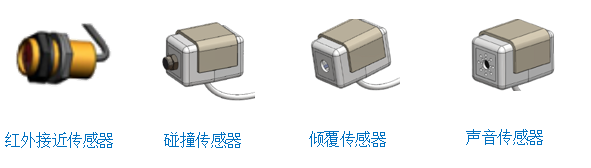
¶ 1.3创意之星传感器
创意之星的传感器阵列有多种数字量IO和模拟量ADC传感器。
数字量I/O传感器
SIG/VCC/GND三线制接口,TTL电平,可以连接到控制器的数字量输入通道。
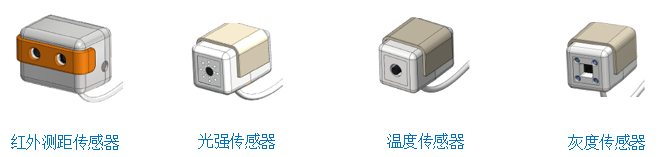
模拟量 A/D传感器
SIG/VCC/GND三线制接口,可以连接到控制器的模拟量输入通道。
¶ 创意之星执行器
创意之星以舵机为执行器,驱动构型完成相应的动作。
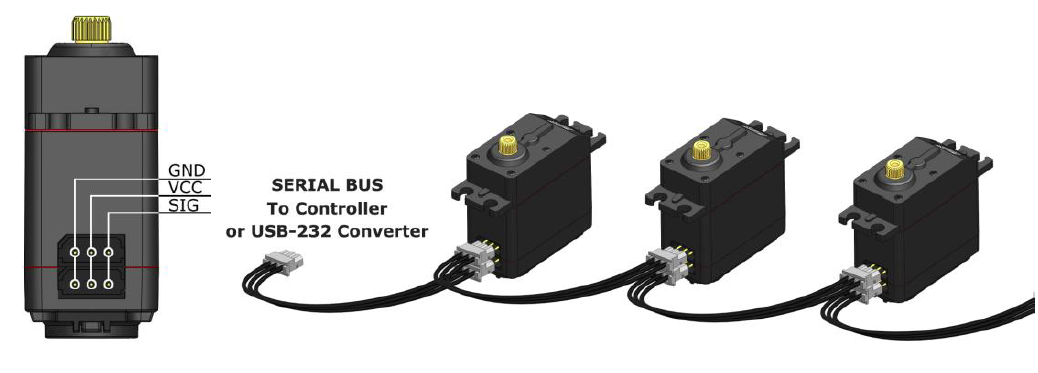
proMOTION CDS系列机器人舵机属于一种集电机、伺服驱动、总线式通讯接口为一体的集成伺服单元,主要用于微型机器人的关节、轮子、履带驱动,也可用于其他简单位置控制场合。
CDS5516数字舵机是通过串行总线连接,数字式控制/反馈,最多可连接254个节点。
注意事项:
-
位置伺服范围0-300°,对应的数值设定范围0~1023 ,中位为512,在中位时可进行正负150°的旋转;电机模式下可以进行整周的旋转,对应的设定的数值是-1023~1023,最大速度大约1s一圈。
-
使用前应先设定ID,默认ID为1。舵机模式下使用,先将伺服位置调至512中位。
-
通电情况下请勿对舵机进行手动旋转操作。
¶ 创意之星结构件
包含50余种,数百个常用结构零件,采用高品质ABS材料,制造精度可达0.01mm。
结构采用创新设计的花键式多角度连接结构,以螺栓作为紧固方式,以舵机形成多关节、多自由度的运动机构,并配合各类结构零件。

结构件设计更体现舵机与结构的融合,充分展现舵机带来的多自由度、多关节以及结构件的连接多变、灵活,可搭建更为稳定、形态多变的机器人。
为了更方便学习使用,我们配有搭建手册,请参考随设备赠送的搭建手册。
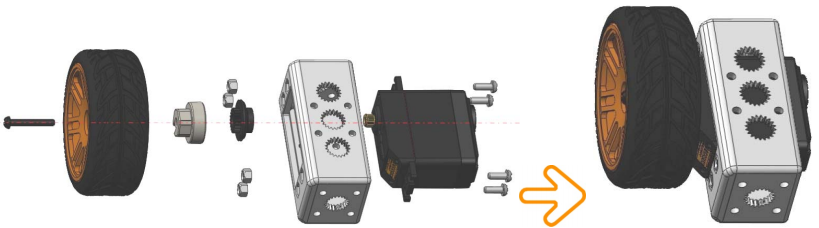
车轮组装
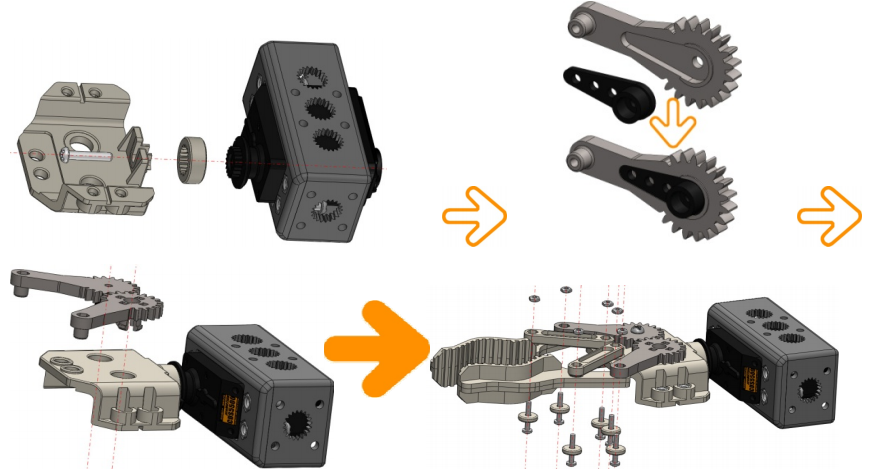
机械手爪组装
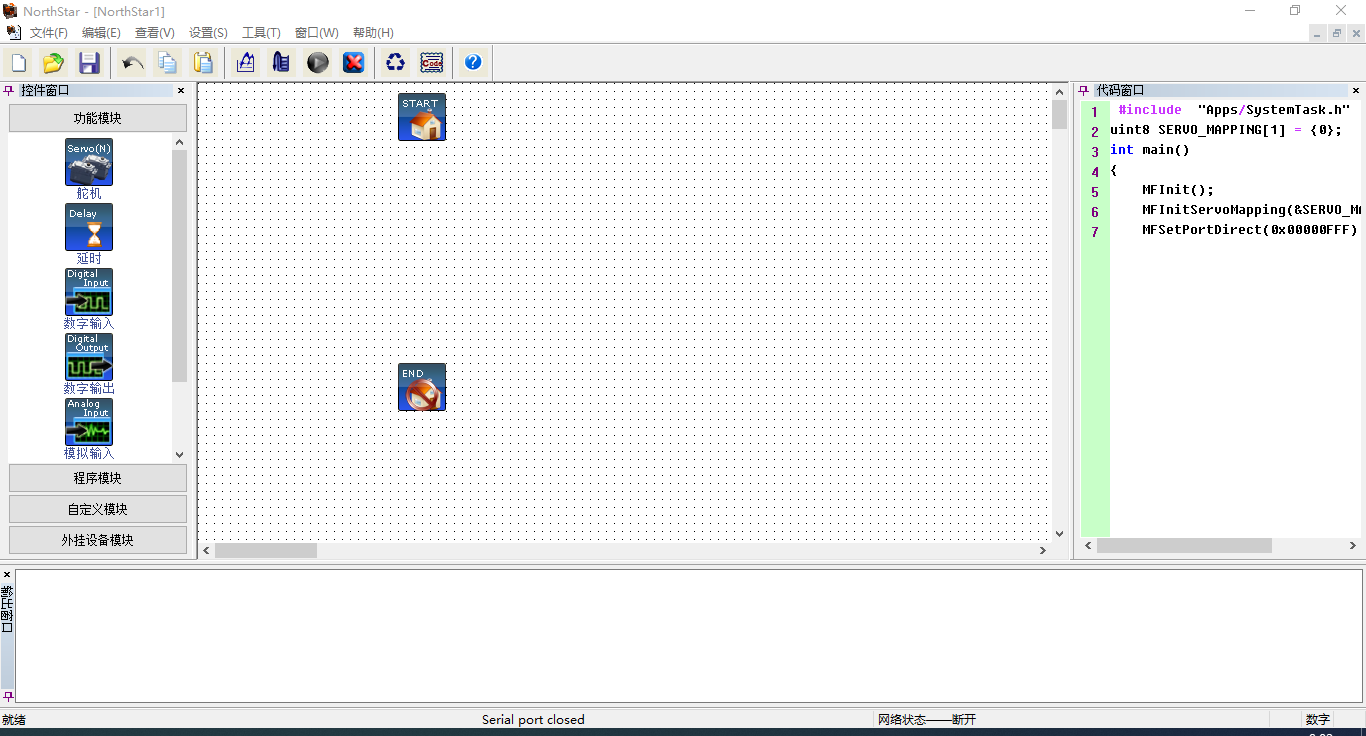
¶ 创意之星图形化编程软件
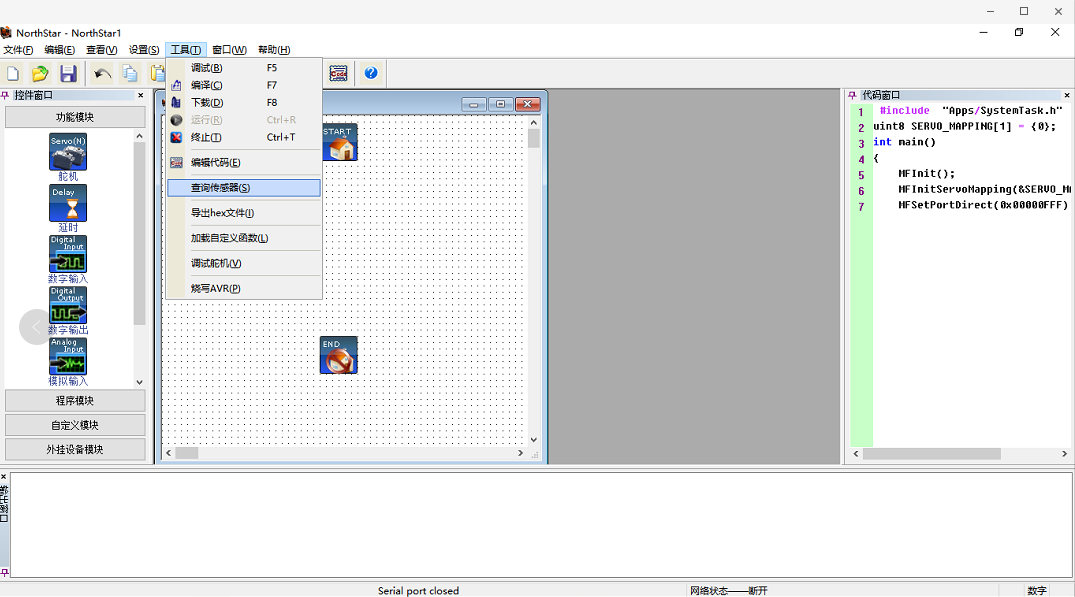
NorthStar(图形化编译软件) ,有32位和64位两个版本。安装好打开如下图:
使用NorthStar软件编写好程序,编译成功话会生成.hex文件,下载需要用到多功能调试器,选择AVRISP模式下载,五针下载线接控制器Mega128口,然后点击下载即可。
¶ 传感器输入检测,舵机设置
¶ 基于控制器与NorthStar软件
传感器在控制器上接好线后给控制器上电,电脑上打开NorthStar,注意控制器选项按默认选择MultiFLEX2-AVR,然后一直点下一步,直到完成。
然后在菜单栏选择工具—查询传感器。
出现如下界面,先将多功能调试模式选为中间AVRISP模式,然后点左下角的“启动服务”按钮,这时候会有程序下载到控制器,只有保证控制器是这个程序才可以查询传感器或调试舵机。
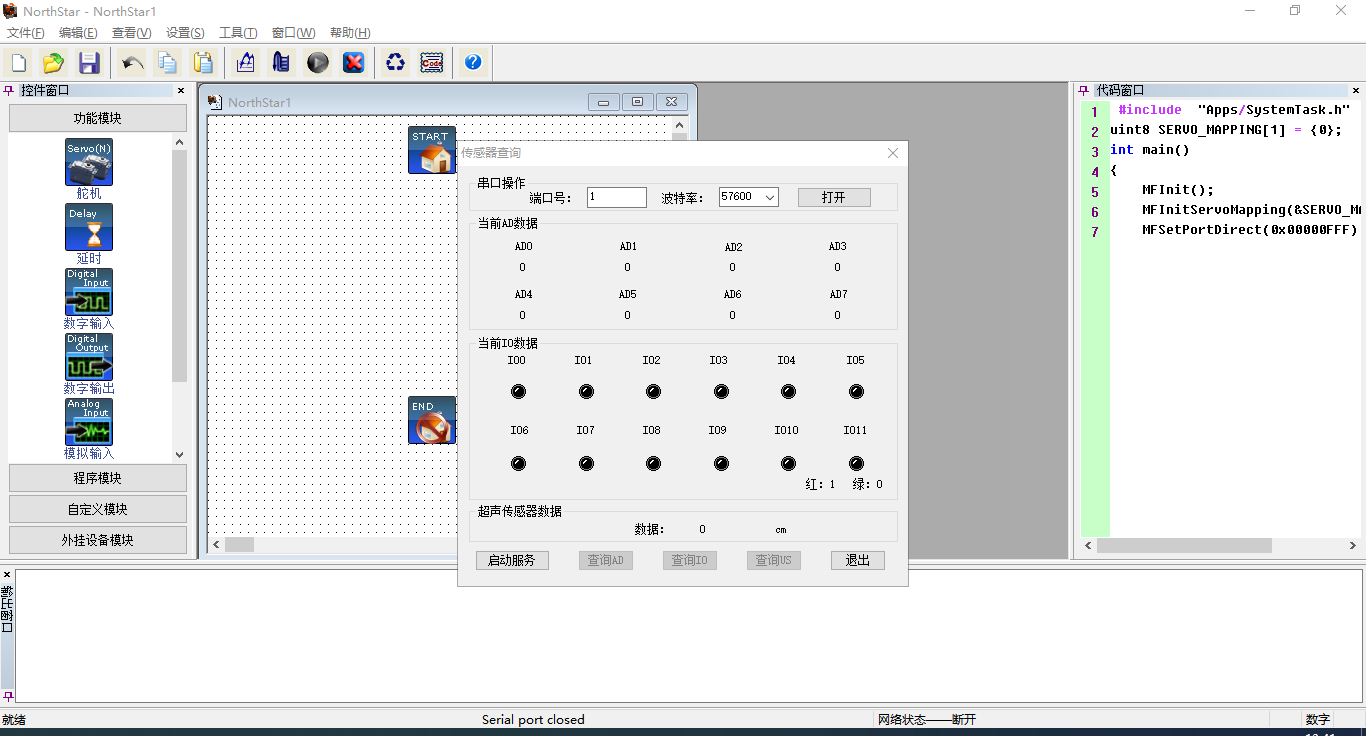
然后将多功能调试器模式切换为RS232,电脑NorthStar软件界面输入多功能调试器对应串口号,点右面的“打开”按钮。我们将数字量或模拟量传感器接到控制器对应的IO或AD口,注意插接方向,然后点查询IO或查询AD即可。如果调试舵机操作类似,选择菜单栏—工具,再选调试舵机。
¶ 基于多功能调试器与舵机调试软件
对舵机修改ID号,调试需要用到RobotservoTerminal软件,如下图:

将舵机和12V外接电源分别接到多功能调试器对应接口上,多功能调试器USB口接计算机并成功安装好驱动软件,就可以在计算机的设备管理器里找到相应的端口号,多功能调试器这时要选择Servo模式。

电气连接正确,输入多功能调试器的端口号(图示计算机接多功能调试器端口号为1,自己安装多功能调试器驱动会随机分配端口号,以各自为准),波特率按默认1000000并打开,如下图:

然后点击“开始查找”,直到找到舵机,点击停止“stop”。
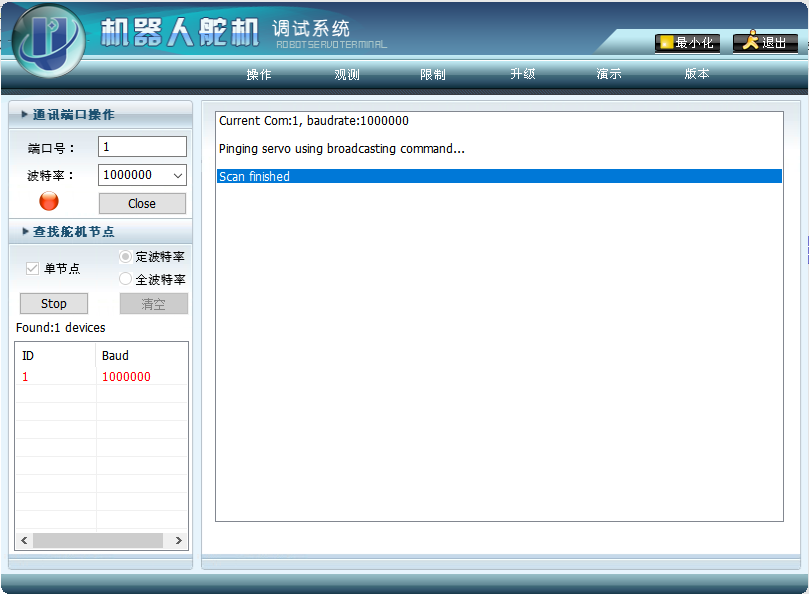
首先在下拉框中选中要修改 ID 的舵机,返里只有一个 ID 为 1 的舵机。在右侧基本设置窗口“ID”输入框中输入需要更改的ID号,比如2,点击旁边的“设置”按钮。可以看到ID 号由1变为2,说明修改成功。舵机断电后ID会自动保存。

波特率、迒回值、迒回延时设置方法与 ID 设置一样,用创意之星一般不需要更改。
在控制操作界面,我们还可以配置舵机的工作模式和调试舵机,工作模式有舵机模式和电机模式。