¶ 机器人自动回充介绍
自动回充,即机器人自动返回充电桩充电。
机器人要想实现自动回充,首先需要有一个充电桩,充电桩上有一个充电接口,机器人需要回到充电座上,然后充电桩通过接口给机器人充电。
充电桩一般要求有充电保护:过流、过压、过冲保护等。充电桩一般需要有定位标识,帮助机器人找到并准确对接充电接口。
一般来讲,有以下三种充电对接方案:
- 红外传感器对接;
- 视觉特征对接;
- 激光特征对接;
¶ 红外方案
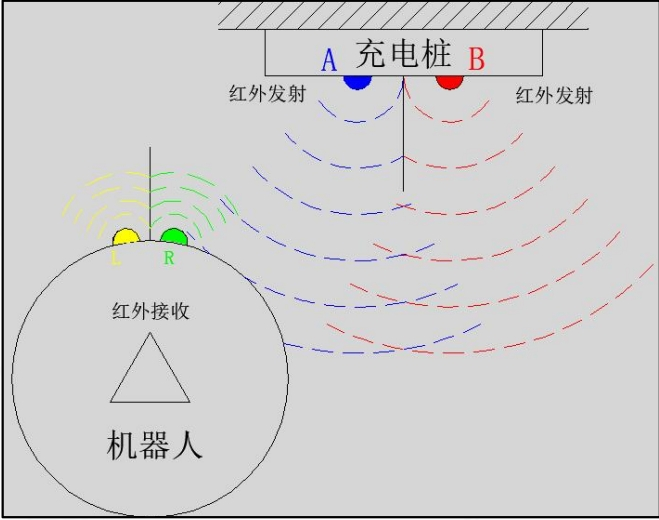
红外方案是自动回充的传统成熟方案,也是实现自动回充中的充电对接的最低成本的方案。其原理是利用 2 个或以上的红外发射管,创建以充电桩为中心的多个红外光信号区域;
同时在机器人身上安装 2 个或以上红外接收管,根据红外接收管的数据,判断机器人位于哪个红外光信号区域内,同时判断机器人与充电桩的相对姿态(方向)。如下图所示。
¶ 激光雷达方案
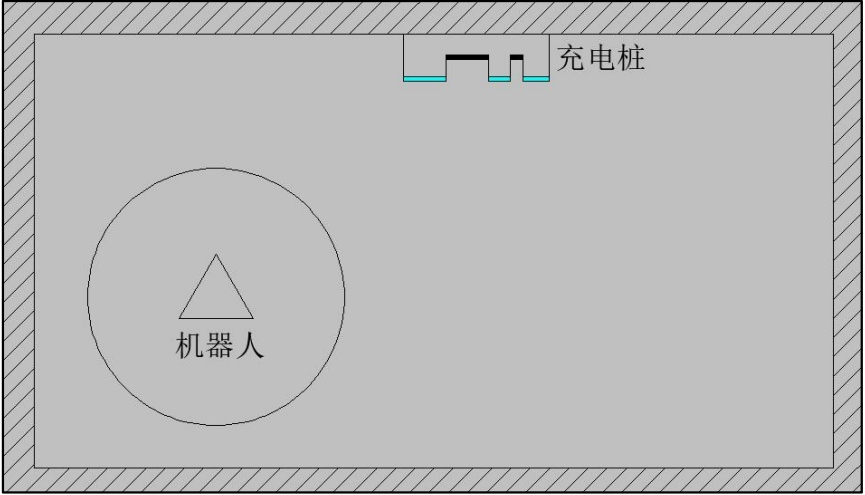
激光雷达方案是也近年来自动回充的实用方案,其原理是利用雷达扫描机器人周围的环境,从这些扫描数据识别出充电桩位置与姿态,然后向充电桩靠近最后对接充电口。
雷达识别充电桩的原理如下图所示,主要是加强充电桩的特征,使我们的识别算法更容易实现,如下图的充电桩有规律的凹凸结构,同时充电桩表面有规律地覆盖了不同反射强度的材质,图中充电桩青色部分代表高反射强度材质,黑色部分代表低反射强度材质。
¶ 视觉方案
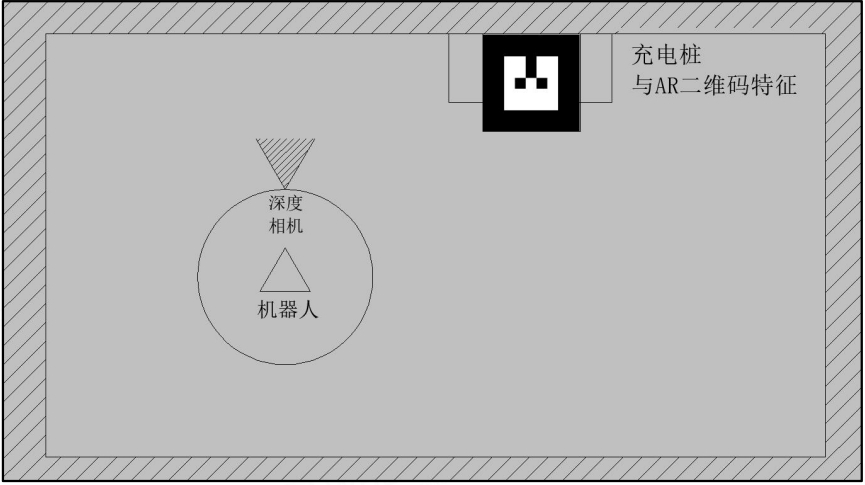
图像识别方案即通过通过相机获取环境图像,然后在环境图像中寻找充电桩,并计算充电桩与机器人的相对位置与姿态,然后控制机器人靠近机器人和对接充电口。图像识别方案可以利用AR二维码,如下图所示,在充电桩上粘贴AR二维码,机器人上的深度相机识别到该二维码后,计算深度相机与二维码的相对位置。
¶ 自动回充功能使用
卓尔ARM自动回充功能需要首先完成SLAM与Navigation建图与导航。
- 首先,靠墙部署好您的充电桩。
- 将机器人放置在充电桩位置上,准确的对接充电口。
- 此时,打开建图脚本,开始建图。建图完成后,保存地图。将机器人开回充电桩位置(即建图起点)。
- 关闭所有终端,打开新的终端,输入以下命令:
cd ~/robot_shell
./10-auto_charge.sh
打开导航的rviz,即可以看到充电桩位置展示在地图上。
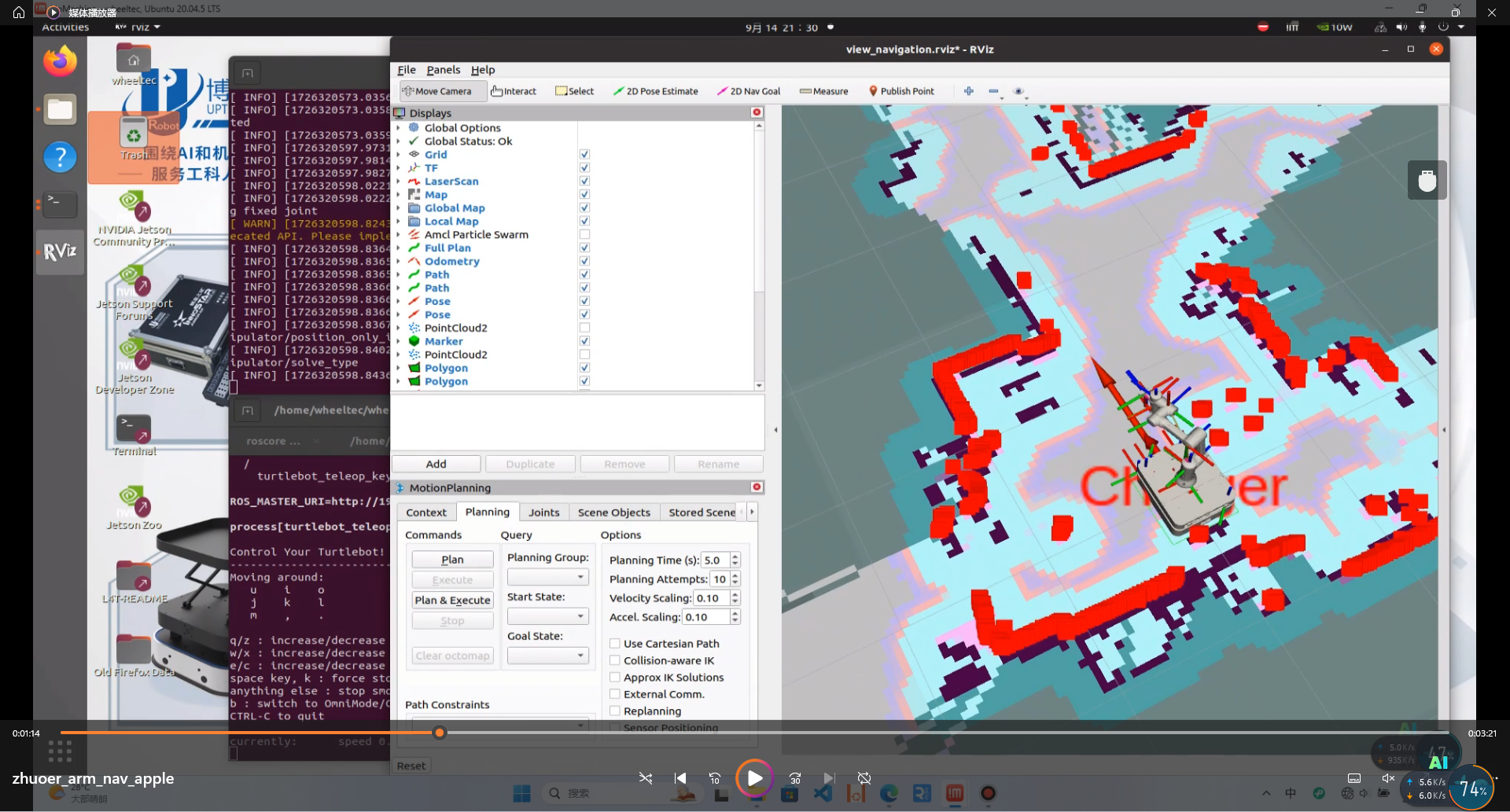
如上图所示charger,即为充电桩位置。
这时,可以2D Nav Goal让机器人自由导航,如果想要返回基站,则切换到最后一个终端,按下q键,机器人会自动返回基站。如下视频所示:
自动回充功能演示视频