¶ 卓尔ARM用户手册

¶ 产品介绍
卓尔-ARM复合机器人是面向机器人工程、人工智能、自动化类、机械类、计算机类、电子信息类等工科专业的应用综合实训、毕业设计及科研创新的平台。卓尔-ARM采用高精度线控底盘+六自由度机械臂的典型复合机器人设计架构,搭载激光雷达、深度相机、惯性测量单元等传感器用于环境感知、导航定位、路径规划与避障,可实现对货物的精准视觉移动抓取,搬运放置等应用,可面向多种应用场景。
卓尔-ARM平台能够依据教学需求,有效开展复合机器人实训教学以及软件算法系统二次开发。该产品在软硬件设计方面与教学场景高度契合。
面向复合机器人实训教学,卓尔-ARM各组成模块,传感器,处理器,机械臂,末端夹爪,定位导航视觉软件算法均支持单模块调试,验证,教学,并配套48学时的综合实训课程,系统性的以一个自主导航抓取搬运任务为主线,学习并体会复合机器人核心技术体系。
面向复合机器人软件算法教学实训与二次开发,卓尔-ARM内置的功能软件算法均为行业级标准,支持超大范围建图,重复定位精度5cm以内,规划算法/轨迹跟踪具备行业先进水平,算法开源并提供完善的注释,同时提供ROS接口可以直接调用进行二次开发。机械臂支持ROS架构下的Moveit!框架开发,并且预留了丰富的接口,配套详尽的二次开发手册。
¶ 产品组成
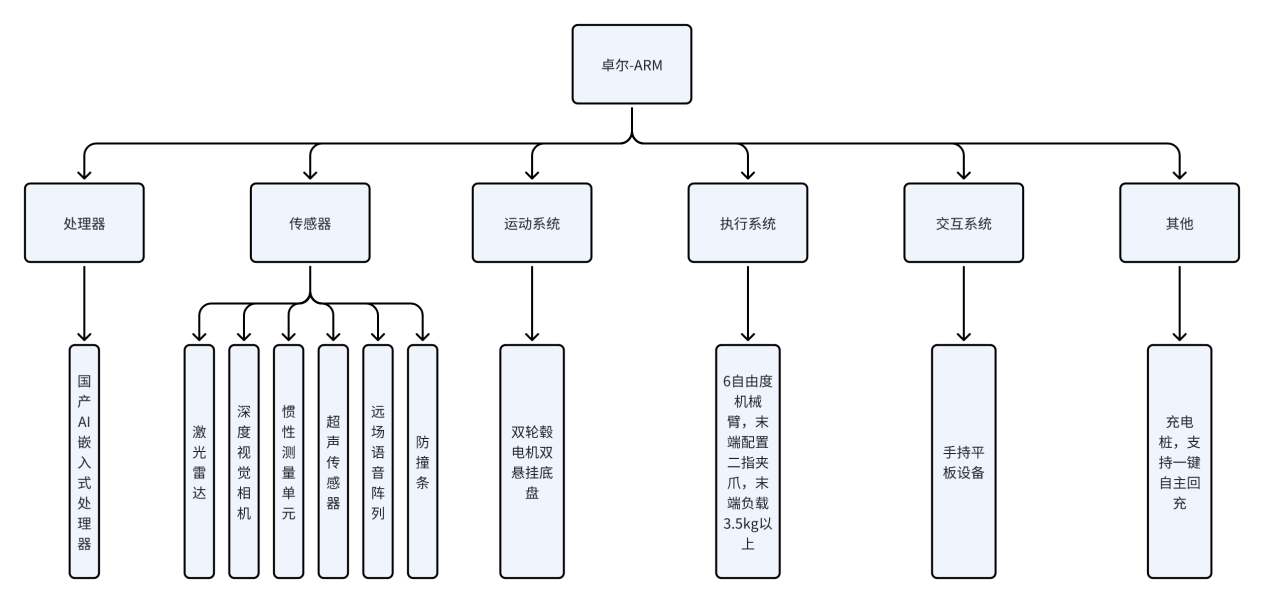
卓尔-ARM硬件部分由AI处理器、传感器系统、运动控制系统、执行单元、交互系统,充电桩六部分组成。
卓尔ARM软件系统分为两部分,机载软件和手持设备调试软件;
卓尔ARM机载软件运行在AI主控制器上,分为传感器驱动软件,AI与算法软件,通讯软件三大模块;
传感器驱动软件对深度相机,激光雷达,惯性测量单元,超声传感器,防撞条,远场语音阵列进行通讯,获取传感器数据,数据滤波处理。驱动底盘运动,获取轮式里程计信息;
AI与算法软件进行多传感器信息融合,定位并感知当前环境,进行路径规划与轨迹跟踪,确保机器人连续自动运行。视觉与AI软件识别并精准定位物体,驱动机械臂完成抓取;
通讯软件与手持设备进行连接,将当前地图,路径,机器人实时位置等反馈给手持设备,手持设备可对任务进行管理与下达。
¶ 产品功能
详见下方文档,讲解了卓尔-ARM的各项功能与使用运行脚本。
¶ 产品教学
¶ 产品使用
¶ 编程与ROS基础教学
- 远程连接AI处理器
- Linux操作系统基础
- 机器人C++编程基础
- 机器人Python基础
- ROS机器人操作系统介绍
- ROS-主题与消息
- ROS-服务
- ROS-参数
- ROS-动作
- ROS-调试工具与日志
- ROS-动态参数